

Byting Bulldogs' Second Year
In the 2012 season, the team decided it was ready to separate from its mentor team. The Byting Bulldogs quickly learned to write grants, solicit sponsors, and establish relationships with local fabrication shops and other businesses that could contribute technology, supplies, or knowledge.
In the eyes of the team, the 2012 season was hugely successful because it proved the team could stand on its own. After setting up a new build space and establishing business processes, the team was able to accomplish quite a bit in the 2012 competition season.

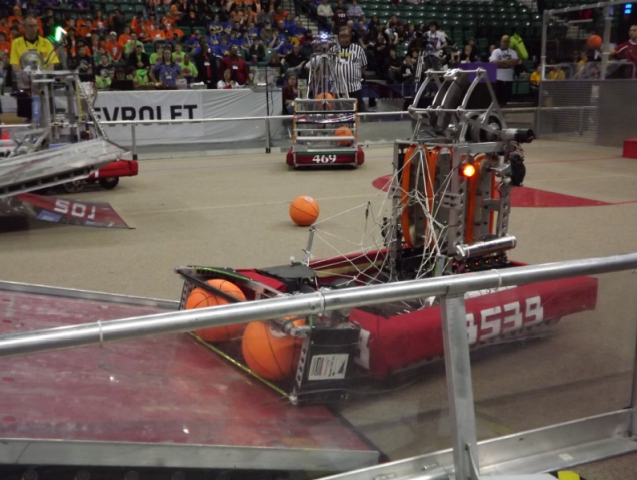
2012 Byting Bulldogs at the Michigan State Championship
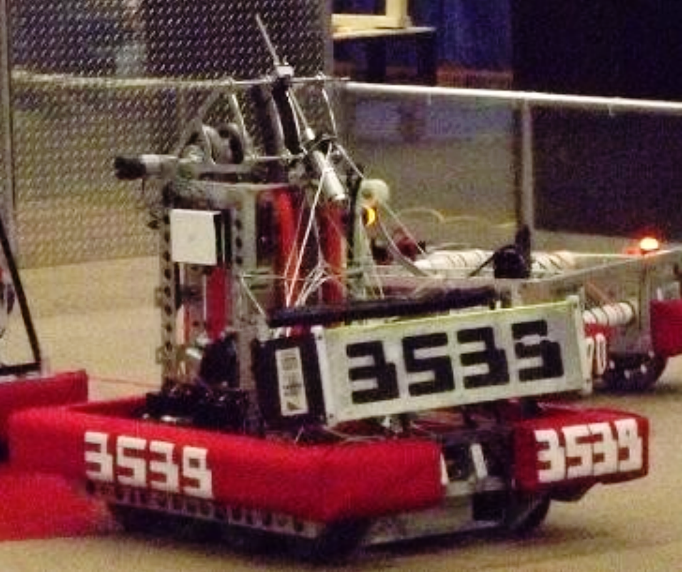














The Robot, "Stan"
This robot was designed to pick up basketballs with a drop-down bucket and throw them into a conveyor system that fed into a flywheel shooter. It also used the bucket to lower the bridges to cross the field. It had an eight-wheel pneumatic tire drive train to cross any bumps on the field.
Honors
Waterford District Competition:
General Motors Industrial Design Award
District Semifinalist
Troy District Competition:
Motorola Solutions Foundation Quality Award
District Quarterfinalist
FIRST in Michigan State Championship:
Seeded 13th going into eliminations
The Game
Rebound Rumble was designed to resemble basketball: the game piece was a basketball and the main method of scoring was by shooting the ball into basketball hoops set at varying heights. At the start of the match, two of the three alliance members’ robots were controlled autonomously, while the third alliance member was allowed to control its robot either autonomously or by means of Microsoft Kinect. For this reason, the beginning period was referred to as the “hybrid” period instead of as the “autonomous“ period. The object of the game during both hybrid and teleoperated modes was to shoot basketballs through the hoops, with the uppermost hoops earning the most points. At the end of the match, alliance members had to balance on teeter-totter-like bridges at the center of the court. Coopertition points that went toward qualification seeding were awarded for robots of opposing alliances attempting to balance on the same bridge.